一阶倒立摆的Simscape Multibody建模
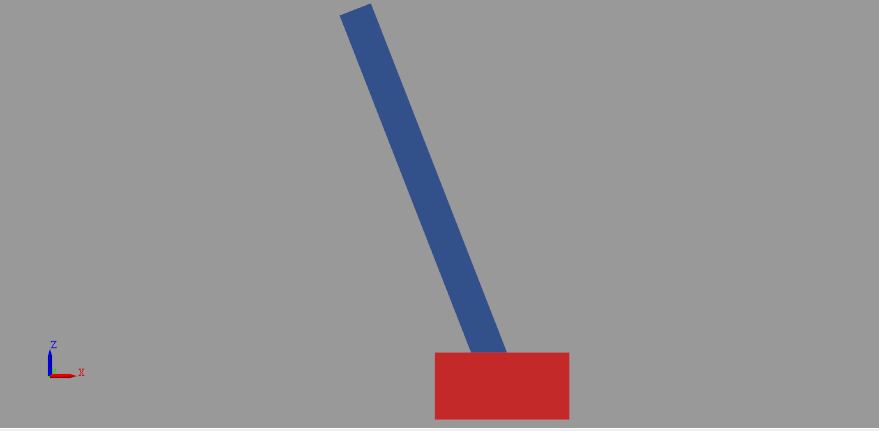
最近做了关于倒立摆的建模,基于simscape的multibody。参考了matlab上相应的示例。
数学模型
倒立摆的受力分析网上有很多,这里就不再叙述。直接放线性化后的方程:
F = (M+m)x″-mLφ″
(I+mL²)φ″= mLx″+ mgLφ
(F为外力,x为物块位移,M,m为物块和摆杆的质量,φ为摆杆相对竖直向上方向的角度)
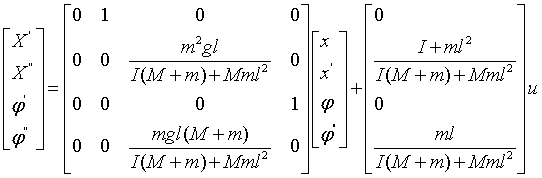
然后建立状态控制方程


得状态矩阵:
##仿真模型
采用得是simscape muktibody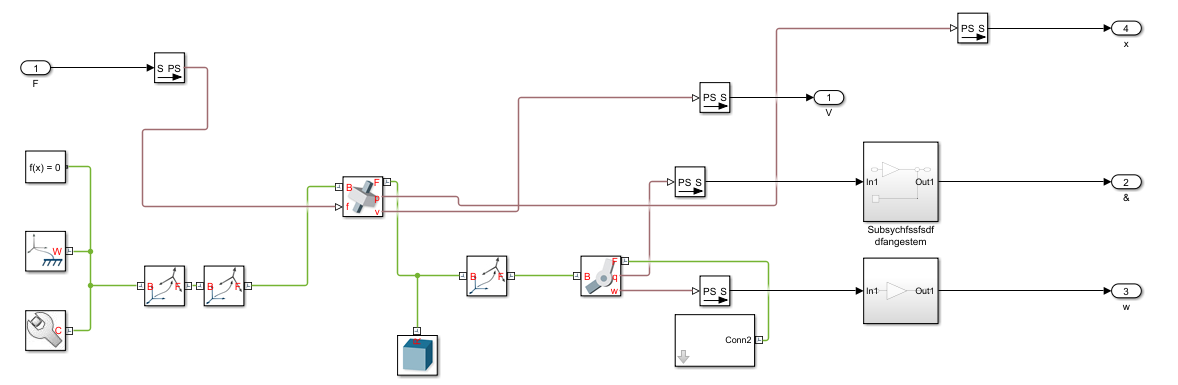
这里说明下,那个conn2的模块里面就是一个solid(摆杆),而out2,out3中间的模块是单位转换用的,转换为角度制。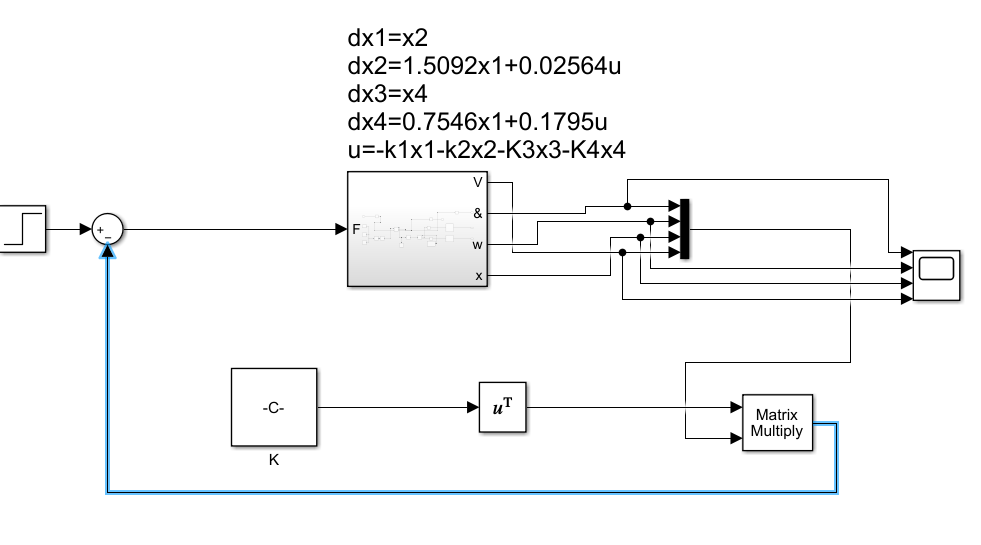
上图是LQR的控制模型,倒立摆模型输出位移,速度,角度,角加速度,K是自己计算的系数矩阵,具体原理可以百度LQR控制器。
整定好参数后,点击运行可以看到仿真的过程,我们也可以打开示波器看四个输出的波形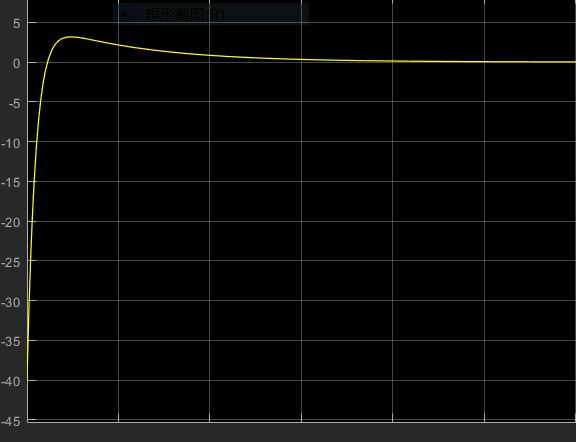
角度波形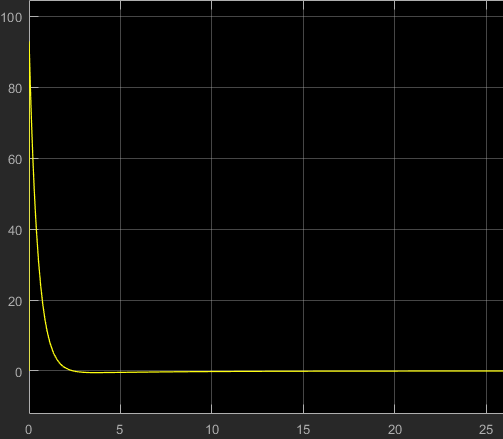
角加速度波形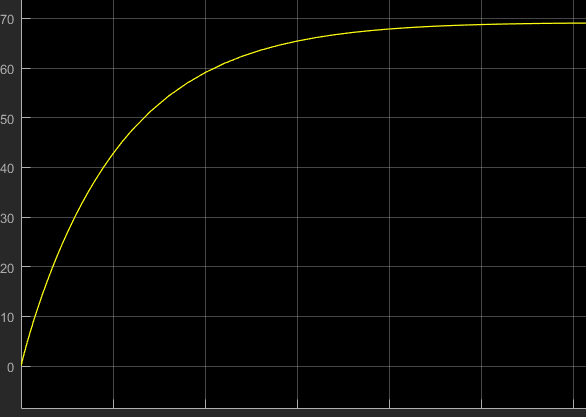
位移波形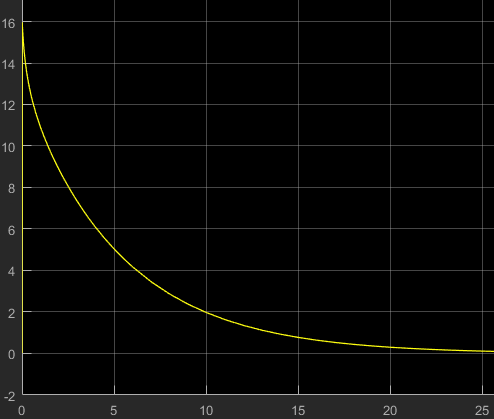
速度波形